| 第8章 连杆机构及其设计 · 机械原理知识点整理 | 您所在的位置:网站首页 › 平面连杆机构的类型特点和分类 › 第8章 连杆机构及其设计 · 机械原理知识点整理 |
第8章 连杆机构及其设计 · 机械原理知识点整理
|
第8章 连杆机构及其设计
8-1连杆机构及其传动特点
连杆机构特点: 原动件的运动都要经过一个不与机架直接相连的中间构件(连杆 coupler),才能传动从动件 连杆机构传动优点: 运动副一般均为低副。运动副元素为面接触,压强小,承载能力大,润滑好,磨损小,加工制造容易。连杆机构中的低副一般几何封闭,有利于工作的可靠性 故连杆机构又被称为 低副机构 (lower pair mechanism) 原动件运动规律不变的条件下,可以改变各构件的相对长度,来使从动件得到不同的运动规律 连杆曲线 形状随着各构件相对长度的改变而改变,形式多种多样,可用来满足一些特定工作的需要 容易改变运动传递方向、扩大行程、实现增力、远距离传动等连杆机构缺点: 传动路线长:易产生较大的误差积累、降低机械效率 惯性力难以用一般平衡方法加以消除,因而不适用于高速运动 为满足一些运动规律和运动轨迹的设计要求,设计十分繁难连杆机构分类(按各构件间相对运动空间关系): 平面连杆机构 空间连杆机构 8-2平面四杆机构的类型及应用连杆架(side link): 与机架相连的杆 如果能做整周回转则称为曲柄 (crank) 如果只能在一定范围内摆动则称为摇杆(rocker)曲柄摇杆机构: 两个连架杆一为曲柄一为摇杆双曲柄机构: 两个连架杆均为曲柄 若相对两杆长度相等: 且平行,则构成平行四边形机构 两曲柄以相同速度同向转动 连杆作平动 连杆上任一点的轨迹均为以曲柄长度为半径的圆 但不平行,构成逆平行四边形机构双摇杆机构: 两个连架杆都是摇杆 若两摇杆长度相等且最短,则构成等腰梯形机构曲柄滑块机构 正弦机构 偏心轮机构 8-3平面四杆机构的基本知识有曲柄的条件: 满足杆长条件 最短杆长度 + 最长杆长度 ≤ 其余两杆长度之和 最短杆为连杆架/机架 急回运动和形成速度变化系数:
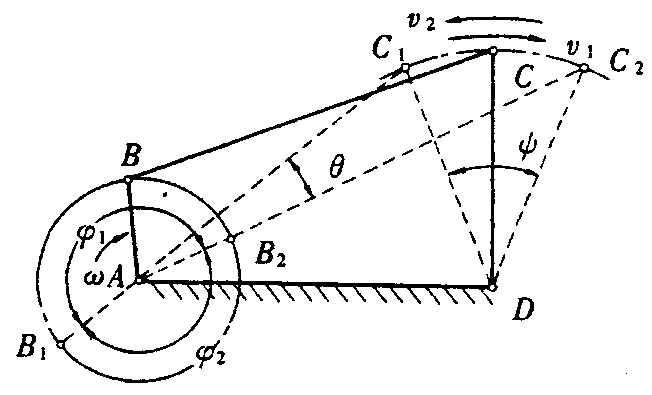
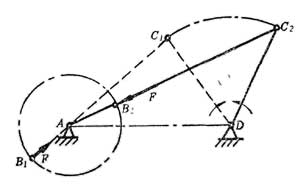
极位:摇杆处于极限位置 极位夹角 θ\thetaθ 急回运动 行程速度变化系数/行程速比系数 KKK K=(180∘+θ)/(180∘−θ) K = (180^{\circ} + \theta) / (180^{\circ} - \theta) K=(180∘+θ)/(180∘−θ) 压力角和传动角(pressure angle, transmission angle): 压力角 α\alphaα :力与速度正方向之间的夹角,越大越好 传动角 γ\gammaγ :压力角的余角,越小越好 死点(dead point):
铰链四杆机构的连杆曲线 铰链四杆机构的运动连续性 8-4平面四杆机构的设计 |
【本文地址】
公司简介
联系我们